|
gaze
0.1.0
Perform gaze tracking with common webcams.
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Properties Friends Groups Pages
|
gaze
0.1.0
Perform gaze tracking with common webcams.
|
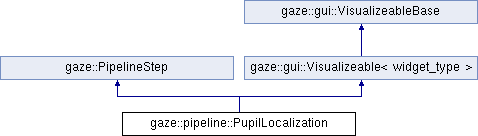
Implements Timm and Barth (2011) Timm2011 to detect eye centers. More...
#include "gaze/pipeline_steps/pupil_localization.h"
Public Member Functions | |
| void | process (util::Data &data) override |
| void | visualize (util::Data &data) override |
 Public Member Functions inherited from gaze::PipelineStep Public Member Functions inherited from gaze::PipelineStep | |
| PipelineStep () | |
| std::string | get_name () |
| virtual | ~PipelineStep ()=default |
| Public Member Functions inherited from gaze::gui::Visualizeable< widget_type > | |
| std::shared_ptr< dlib::drawable > | init (dlib::drawable_window &parent, int width, int height, std::string text="No visualization.") final |
| void | remove_widget () override |
| Public Member Functions inherited from gaze::gui::VisualizeableBase | |
| virtual | ~VisualizeableBase ()=default |
Additional Inherited Members | |
| Protected Attributes inherited from gaze::PipelineStep | |
| int | number |
| std::string | name |
| Protected Attributes inherited from gaze::gui::Visualizeable< widget_type > | |
| std::shared_ptr< widget_type > | widget |
Implements Timm and Barth (2011) Timm2011 to detect eye centers.
This implementation uses a lookup table to pre-calculate the distance function. Additionally, some tweaks are introduced, as explained in the similar implementation eyeLike by Tristan Hume.
For details you can also refer to Tristan's blog post Simple, accurate eye center tracking in OpenCV.
Definition at line 125 of file pupil_localization.h.
|
overridevirtual |
Detects the eye center for each eye.
| data | The data object to be updated. |
data the modified data object. Implements gaze::PipelineStep.
Definition at line 88 of file pupil_localization.cpp.
References gaze::util::Data::centers, gaze::util::Data::eyes, gaze::util::fill_displacement_tables(), gaze::util::get_eyes_chip_details(), gaze::util::Data::image, gaze::util::Data::landmarks, std::max(), std::numeric_limits< class >::min(), gaze::util::normalize_and_threshold_gradients(), sum(), and zero().
|
overridevirtual |
| data | The data object to be updated. |
Implements gaze::gui::VisualizeableBase.
Definition at line 162 of file pupil_localization.cpp.
References gaze::util::Data::centers, gaze::util::Data::eyes, gaze::util::get_eyes_chip_details(), gaze::util::Data::image, and gaze::util::Data::landmarks.
 1.8.6
1.8.6