|
gaze
0.1.0
Perform gaze tracking with common webcams.
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Properties Friends Groups Pages
|
gaze
0.1.0
Perform gaze tracking with common webcams.
|
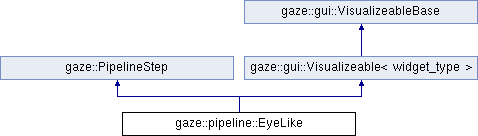
Direct copy of https://github.com/trishume/eyelike. More...
#include "gaze/pipeline_steps/eye_like.h"
Public Member Functions | |
| void | process (util::Data &data) override |
| void | visualize (util::Data &data) override |
 Public Member Functions inherited from gaze::PipelineStep Public Member Functions inherited from gaze::PipelineStep | |
| PipelineStep () | |
| std::string | get_name () |
| virtual | ~PipelineStep ()=default |
| Public Member Functions inherited from gaze::gui::Visualizeable< widget_type > | |
| std::shared_ptr< dlib::drawable > | init (dlib::drawable_window &parent, int width, int height, std::string text="No visualization.") final |
| void | remove_widget () override |
| Public Member Functions inherited from gaze::gui::VisualizeableBase | |
| virtual | ~VisualizeableBase ()=default |
Additional Inherited Members | |
| Protected Attributes inherited from gaze::PipelineStep | |
| int | number |
| std::string | name |
| Protected Attributes inherited from gaze::gui::Visualizeable< widget_type > | |
| std::shared_ptr< widget_type > | widget |
Direct copy of https://github.com/trishume/eyelike.
Definition at line 17 of file eye_like.h.
|
overridevirtual |
Detects the eye center for each eye.
| data | The data object to be updated. |
data the modified data object. Implements gaze::PipelineStep.
Definition at line 290 of file eye_like.cpp.
References gaze::util::Data::centers, cv::COLOR_RGB2GRAY, cv::Mat::cols, cv::cvtColor(), gaze::util::Data::landmarks, rectangle(), cv::Mat::rows, and gaze::util::Data::source_image.
|
overridevirtual |
| data | The data object to be updated. |
Implements gaze::gui::VisualizeableBase.
Definition at line 320 of file eye_like.cpp.
References gaze::util::Data::centers, gaze::util::Data::eyes, gaze::util::Data::image, gaze::util::Data::landmarks, and rectangle().
 1.8.6
1.8.6